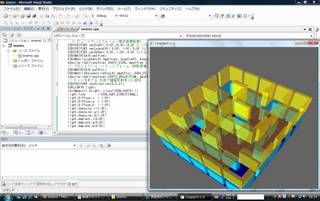
(1)Windows上で三次元迷路解析を行うアプリケーションを作成しています。アルファブレンディングを利用して各フロアの迷路情報を可視化しています。数値化されている元の迷路情報を読みとり、それに応じて3Dパネルを配置します。その後で迷路解析アルゴリズムによって三次元迷路の解析の様子がシミュレーションされます。
(2)二次元迷路解析を行って脱出する自律型路上移動ロボットを開発しています。シンプルなマイコンを用いているため、迷路情報を記憶して移動する方法ではなく、移動した方向だけを記憶して、迷路を解析して脱出します。また、真直ぐに進めるように壁との距離を測定しながらモータを制御します。
